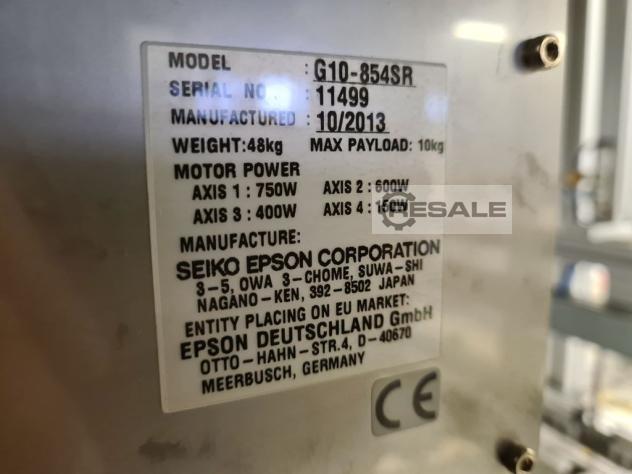
Epson G10-854SR Stazione di dosaggio della stazione di avvitamento
robotizzata
Assemblaggio di parti per autoradio e sistemi di navigazione e per il
loro collaudo.
La stazione di assemblaggio è progettata come un telaio chiuso in
alluminio con un telaio di saldatura in acciaio inserito e ha un
design molto compatto.
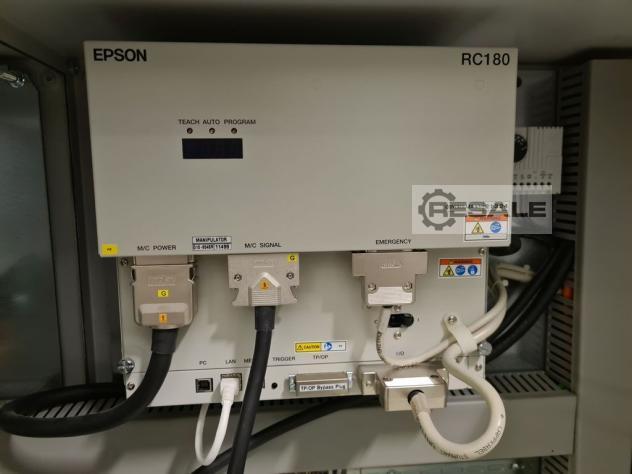
Gli armadi di controllo e i terminali delle valvole sono integrati nel
sistema.
Tutti i processi di movimento durante il funzionamento del sistema
possono essere tracciati su tutti i lati attraverso grandi finestre e
porte.
Il funzionamento avviene tramite un touch screen.
La stazione di assemblaggio è suddivisa in sottostazioni 3.1 area di
dosaggio, 3.2 area di assemblaggio
KK + SW e 3.3 area di montaggio frontale. (KK=dissipatore di calore,
SW=angolo paratia)
Le fasi di lavoro in base a queste aree di assemblaggio sono descritte
di seguito:
St.3.1: Intervallo di dosaggio
- un WT con telaio collegato e circuiti stampati entra nell'area di
dosaggio attraverso la cinghia di trasferimento.
- questo viene fermato all'unità di posizionamento della corsa (HuPo)
e sollevato dalla cinghia e fissato
- ora la manipolazione x-y-z sposterà la testina di dosaggio nella
posizione prevista e avvierà il processo di dosaggio.
- dopo il completamento del dosaggio riuscito, la manipolazione si
sposta sulla posizione di riposo e il WT viene posizionato sul
nastro
- Ulteriore trasporto all'area di assemblaggio KK+S\WV (prerequisito
nessun WT in posizione di assemblaggio)
La quantità di dosaggio può essere selezionata nel controllo del
dispenser (Scheugenpflug) e tramite il PLC a seconda della
posizione
Le posizioni possono essere visualizzate tramite il pannello di
controllo
St.3.2: Area di montaggio KK + SW
- tramite la cinghia di trasferimento, un WT corre dall'area di
dosaggio all'area di assemblaggio KK+SW.
- questo viene fermato all'unità di posizionamento della corsa
(HuPo), sollevato dalla cinghia e fissato, mentre le pareti laterali
del telaio del gruppo parzialmente assemblato sono allineate
- contemporaneamente avviene il posizionamento del vassoio KK e del
vassoio SW
- una pila di vassoi KK (12) e una pila di vassoi SW (12) sono
posizionate manualmente all'esterno dell'involucro protettivo sulla
rispettiva cintura di alimentazione
- le due paratie di sicurezza vengono aperte e le pile dei vassoi
caricate corrono nella posizione di presa del rispettivo carrello
elevatore
- le due paratie di sicurezza vengono richiuse
- le rispettive pinze afferrano il vassoio corrispondente
- con l'asse z avviene la separazione del vassoio e il trasporto verso
l'alto (oltre l'altezza effettiva della rimozione)
- per il centraggio e la stabilizzazione del vassoio, un supporto di
centraggio viene spinto e posizionato sotto il rispettivo vassoio
mediante x-handing.
- con l'asse z del carrello elevatore, il rispettivo vassoio viene
posizionato sul cuscinetto di centraggio corrispondente
- i vassoi sono pronti per la rimozione dei componenti
- con la pinza multipla sul robot Scara, il KK viene afferrato nel
vassoio e posto in posizione intermedia come ausilio all'allineamento
(al fine di ottenere imprecisioni durante il prelievo dalla posizione
di presa mancante per il montaggio)
- il KK viene scansionato, afferrato di nuovo e installato sul WT se
il risultato dello scanner è OK
- il n.i.O. KK è conservato in una scatola n.i.O.
- la pinza multipla sul robot Scara afferra quindi il SW nel vassoio e
lo posiziona in posizione di allineamento
- il SW viene nuovamente afferrato e installato sul WT
- continuare con l'area di montaggio frontale
- se i vassoi forniti sono vuoti, vengono conservati sul nastro di
scarto corrispondente
- a tal fine, i carrelli elevatori sono posizionati di conseguenza per
mezzo di assi x
- i vassoi vuoti vengono scartati solo quando le pile complete dei
vassoi sono state lavorate
- le paratie di sicurezza corrispondenti vengono aperte e le pile di
vassoi vuote vengono scaricate per la rimozione manuale
- le due paratie di sicurezza vengono richiuse
St.3.3: Area di montaggio frontale
- la parte anteriore è posizionata sul WT circonferenziale in un nido
separato
- con la pinza multipla sul robot Scara, la parte anteriore viene
rimossa dal WT equipaggiato con KK e SW nell'area di assemblaggio
KK+SW
- la parte anteriore è posizionata nel nido di un'unità di montaggio
- il WT corre sulla cinghia di trasferimento dall'area di assemblaggio
KK+SW alla parte anteriore dell'area di montaggio e viene fermato
dall'unità di posizionamento del mozzo, sollevato dalla cinghia e
fissato, mentre il telaio viene tenuto premuto
- il frontale posizionato è unito da un movimento di sollevamento
rotativo sul WT
- dopo il completamento dell'assemblaggio frontale riuscito, l'unità
di assemblaggio si sposta nella posizione di partenza e il WT è


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


 Germania
Germania