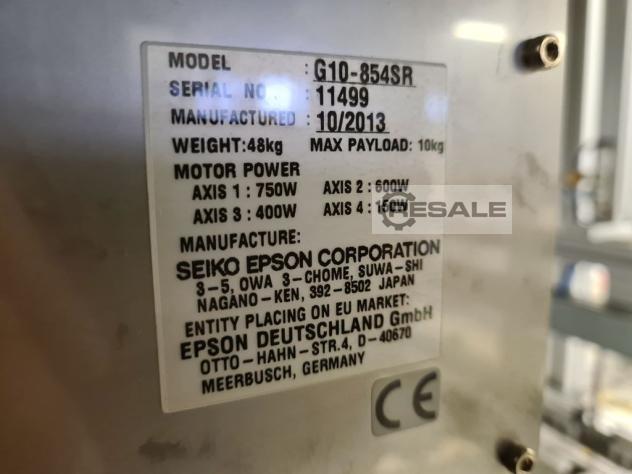
Epson G10-854SR Stacja dozująca robota do wkręcania
Montaż części do radiotelefonów samochodowych i systemów
nawigacyjnych oraz do ich testowania.
Stanowisko montażowe jest zaprojektowane jako zamknięta aluminiowa
rama z wstawioną stalową ramą spawalniczą i ma bardzo kompaktową
konstrukcję.
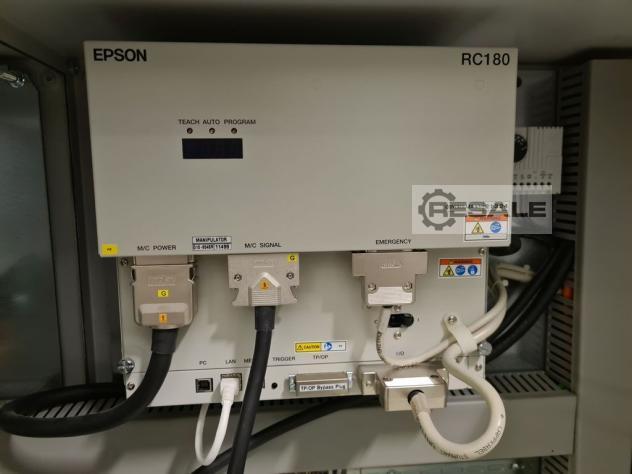
Szafy sterownicze i zaciski zaworów są zintegrowane z systemem.
Wszystkie procesy ruchu podczas pracy systemu mogą być śledzone ze
wszystkich stron przez duże okna i drzwi.
Obsługa odbywa się za pomocą ekranu dotykowego.
Stanowisko montażowe podzielone jest na podstacje 3,1 obszaru
dozowania, 3,2 obszaru montażu
KK + SW i 3.3 obszar montażowy z przodu. (KK = radiator, SW = kąt
grodzi)
Etapy pracy zgodnie z tymi obszarami montażu opisano poniżej:
St.3.1: Zakres dawkowania
- WT z dołączoną obudową i płytkami drukowanymi wchodzi do
obszaru dozowania przez pasek transferowy.
- jest zatrzymywany na jednostce pozycjonującej skok (HuPo) i
podnoszony z pasa i naprawiany
- teraz obsługa x-y-z przeniesie głowicę dozującą w zamierzone
miejsce i rozpocznie proces dozowania.
- po zakończeniu udanego dozowania, obsługa przesuwa się nad
pozycją spoczynkową, a WT jest umieszczana na pasie
- Dalszy transport do miejsca montażu KK+S\WV (warunek wstępny brak
WT w pozycji montażowej)
Ilość dozowania można dobrać w sterowaniu dozownikiem
(Scheugenpflug) i za pomocą sterownika PLC w zależności od
położenia
Pozycje można przeglądać za pomocą panelu sterowania
St.3.2: Obszar montażowy KK+SW
- za pomocą taśmy transferowej WT biegnie od obszaru dozowania do
obszaru montażu KK+SW.
- jest zatrzymany przy jednostce pozycjonującej skok (HuPo),
podnoszony z pasa i zamocowany, podczas gdy ściany boczne podwozia
częściowo zmontowanego zespołu są wyrównane
- w tym samym czasie odbywa się pozycjonowanie tacy KK i tacki SW
- stos tacek KK (12) i stos tacek SW (12) są ręcznie umieszczane
poza obudową ochronną na odpowiednim pasie dopływowym
- dwie bezpieczne grodzie są otwierane, a załadowane stosy tac
biegną do pozycji chwytania odpowiedniego wózka widłowego
- dwie grodzie bezpieczeństwa są ponownie zamknięte
- odpowiednie chwytaki chwytają odpowiednią tacę
- przy osi Z następuje separacja tacek i transport w górę (ponad
rzeczywistą wysokość demontażu)
- do centrowania i stabilizacji tacy, podpora centrująca jest
popychana i umieszczana pod odpowiednią tacą za pomocą
x-handingu.
- z osią z wózka widłowego, odpowiednia taca jest umieszczona na
odpowiedniej podkładce centrującej
- tace są gotowe do demontażu komponentów
- z wielokrotnym chwytakiem na robocie Scara, KK jest chwytany w tacy
i umieszczany w pozycji pośredniej jako pomoc w wyrównaniu (w celu
uzyskania niedokładności podczas podnoszenia z brakującej pozycji
chwytającej do montażu)
- KK jest skanowany, ponownie chwytany i instalowany na WT, jeśli
wynik skanera jest OK
- n.i.O. KK jest przechowywany w pudełku n.i.O.
- wielokrotny chwytak robota Scara następnie chwyta SW w zasobniku i
umieszcza go w pozycji wyrównania
- SW jest ponownie chwytany i instalowany na WT
- kontynuuj z obszarem montażu z przodu
- jeśli dostarczone tace są puste, są przechowywane na odpowiednim
pasie odrzucającym
- w tym celu wózki widłowe są odpowiednio ustawione za pomocą osi
x
- puste tace są odrzucane tylko wtedy, gdy całe stosy tacek zostały
przetworzone
- odpowiednie grodzie bezpieczeństwa są otwierane, a puste stosy
tacek są rozładowywane w celu ręcznego usunięcia
- dwie grodzie bezpieczeństwa są ponownie zamknięte
St.3.3: Obszar montażowy z przodu
- przód jest umieszczony na obwodowej WT w osobnym gnieździe
- z wielokrotnym chwytakiem na robocie Scara, przód jest usuwany z WT
wyposażonego w KK i SW w obszarze montażowym KK + SW
- przód jest umieszczony w gnieździe jednostki montażowej
- WT przebiega przez pas transferowy z obszaru montażowego KK + SW do
obszaru montażowego z przodu i jest zatrzymywany przez jednostkę
pozycjonującą piastę, podnoszony z pasa i zamocowany, podczas gdy
podwozie jest przytrzymywane
- umieszczony przód jest połączony obrotowym ruchem podnoszącym na
WT
- po zakończeniu udanego montażu frontu jednostka montażowa
przesuwa się do pozycji wyjściowej, a WT jest


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


 Niemcy
Niemcy