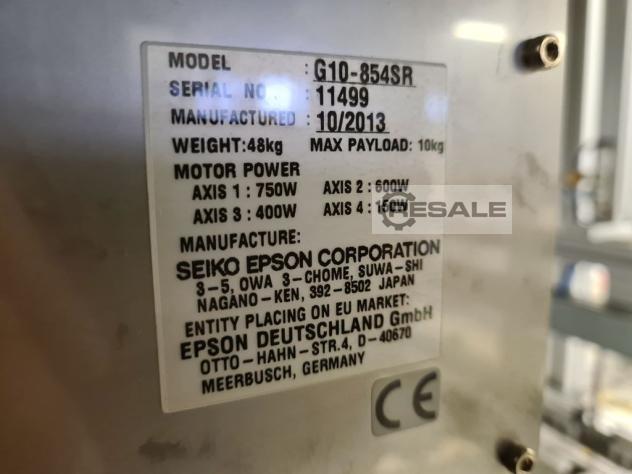
Станція дозування роботів Epson G10-854SR
Збірка деталей для автомагнітол і
навігаційних систем і для їх
тестування.
Складальна станція спроектована у
вигляді закритої алюмінієвої рами з
вставленою сталевою зварювальною
рамою і має дуже компактну
конструкцію.
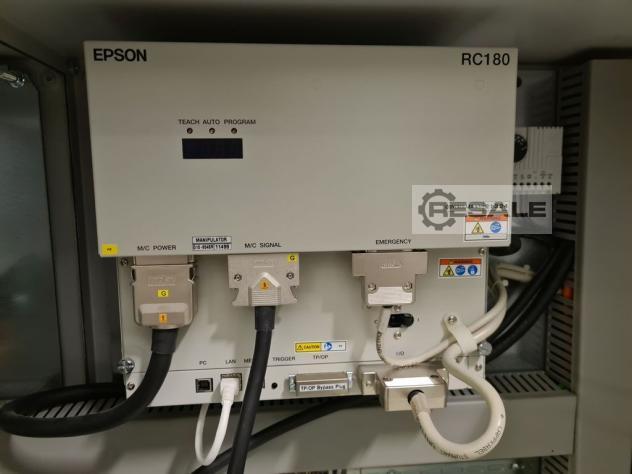
Шафи управління і клапанні клеми
інтегровані в систему.
Всі процеси руху в процесі роботи
системи можна відстежити з усіх боків
через великі вікна і двері.
Робота здійснюється через сенсорний
екран.
Складальна станція розділена на
підстанції 3.1 зона дозування, 3.2
монтажна зона
KK+SW і 3.3 монтажна зона спереду. (KK=
радіатор, SW = кут перебирання)
Етапи роботи відповідно до цих
областей складання описані нижче:
Ст.3.1: Діапазон дозування
- WT з прикріпленим шасі і друкованими
платами надходить в зону дозування
через роздавальний ремінь.
- це зупиняється на вузлі
позиціонування ходу (HuPo) і знімається
з ременя і фіксується
- тепер обробка x-y-z перемістить
дозуючу головку в передбачуване місце
і запустить процес дозування.
- після завершення успішного
дозування керованість переміщається
по положенню спокою і WT ставиться на
ремінь
- Подальше транспортування в зону
складання KK+S\WV (обов'язкова умова
відсутності WT в положенні збірки)
Кількість дозування може бути вибрана
в контролі дозатора (Scheugenpflug) і через
ПЛК в залежності від положення
Позиції можна переглянути через
панель управління
Ст.3.2: Монтажна зона KK+SW
- через роздавальний ремінь WT
проходить від зони дозування в зону
складання KK +SW.
- це зупиняється на вузлі
позиціонування ходу (HuPo), знімається з
ременя і фіксується, при цьому бічні
стінки шасі частково зібраного вузла
вирівнюються
- одночасно відбувається
позиціонування лотка КК і лотка SW
- штабель лотків KK (12) та штабель для
лотків SW (12) вручну розміщуються за
межами захисного корпусу на
відповідному ремені живлення
- відкриваються дві запобіжні
перегородки і завантажуються лоткові
штабелі запускаються в захопливе
положення відповідного навантажувача
- дві перегородки безпеки знову
закриті
- відповідні захвати захоплюють
відповідний лоток
- з віссю z відбувається поділ лотка і
транспортування вгору (над фактичною
висотою видалення)
- для центрування та стабілізації
лотка за допомогою x-handing висувається
опора центрування та розташована під
відповідним лотком.
- за допомогою навантажувача z-осі
відповідний лоток розміщується на
відповідній центрирующей подушечці
- лотки готові до видалення
компонентів
- з багаторазовим захватом на роботі
Scara КК захоплюється в лоток і
поміщається в проміжне положення в
якості допоміжного засобу
вирівнювання (з метою досягнення
неточностей при підборі з відсутнього
положення захоплення для збірки)
- КК сканується, знову схоплюється і
встановлюється на WT, якщо результат
сканера в порядку
- н.і.О. К. К. зберігається в коробці
н.і.о.
- багаторазовий захват на роботі Scara
потім захоплює SW в лотку і поміщає
його в положення вирівнювання
- SW знову схоплюється і встановлюється
на WT
- продовжити з монтажною площею фронту
- якщо надані лотки порожні, вони
зберігаються на відповідному ремені
бракування
- для цього навантажувачі
розташовуються відповідним чином за
допомогою х-осей
- порожні лотки відбраковуються лише
тоді, коли були оброблені повні
лоткові штабелі
- відкриваються відповідні запобіжні
перегородки і вивантажуються порожні
лоткові штабелі для ручного видалення
- дві перегородки безпеки знову
закриті
Ст.3.3: Монтажна площа фасаду
- передня частина розташована по колу
WT в окремому гнізді
- з багаторазовим захватом на робота
Scara передня частина знімається з WT,
оснащеного KK і SW в зоні складання KK +SW
- передня частина розташовується в
гнізді монтажного блоку
- WT проходить по роздавальному поясу
від зони складання KK+SW до зони
кріплення спереду і зупиняється
вузлом позиціонування маточини,
знімається з ременя і фіксується, при
цьому шасі утримується
- розташована передня частина
з'єднується поворотним підйомним
рухом на WT
- після завершення успішної передньої
збірки складальна одиниця переходить
у вихідне положення і WT становить


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


 Німеччина
Німеччина