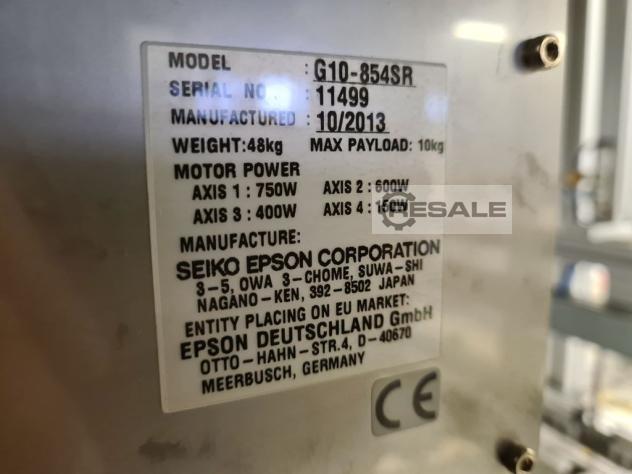
엡손 G10-854SR 로봇 스크류 드라이빙 스테이션 투약
스테이션
자동차 라디오 및 내비게이션 시스템을위한 부품
조립 및 테스트.
조립 스테이션은 강철 용접 프레임이 삽입 된 폐쇄
된 알루미늄 프레임으로 설계되었으며 매우 컴팩트
한 디자인을 가지고 있습니다.
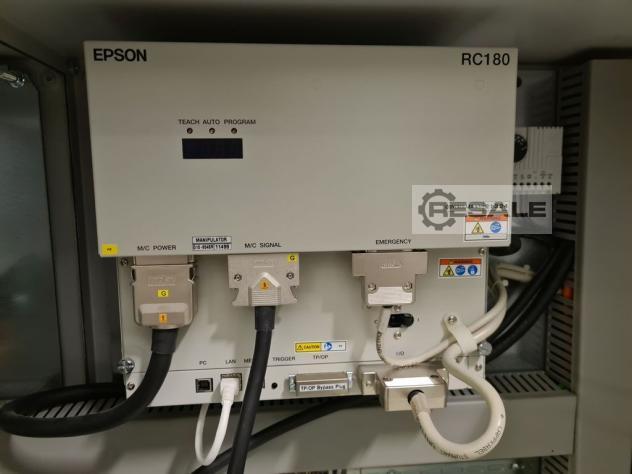
제어 캐비닛과 밸브 단자는 시스템에 통합되어
있습니다.
시스템 작동 중 모든 이동 프로세스는 큰 창문과
문을 통해 모든면에서 추적 할 수 있습니다.
작동은 터치 스크린을 통해 이루어집니다.
조립 스테이션은 변전소 3.1 투약 영역, 3.2 조립
영역으로 나뉩니다.
KK + SW 및 3.3 장착 영역 전면. (KK = 히트 싱크, SW = 벌크
헤드 각도)
이러한 조립 영역에 따른 작업 단계는 다음과
같습니다.
St.3.1: 투약 범위
- 섀시와 인쇄 회로 기판이 부착 된 WT는 이송 벨트를
통해 투약 영역으로 들어갑니다.
- 스트로크 포지셔닝 유닛(HuPo)에서 정지하고 벨트를
들어 올려 고정합니다.
- 이제 x-y-z 핸들링은 투약 헤드를 의도된 위치로
이동시키고 투약 과정을 시작한다.
- 성공적인 투약 완료 후, 핸들링은 나머지 위치로
이동하고 WT는 벨트에 배치됩니다.
- 조립 지역으로의 추가 운송 KK + S \ WV (조립 위치에
WT가 전제 조건이되지 않음)
투약 수량은 디스펜서 (Scheugenpflug)의 제어와 위치에
따라 PLC를 통해 선택할 수 있습니다.
위치는 제어판을 통해 볼 수 있습니다.
St.3.2: 장착 영역 KK+SW
- 이송 벨트를 통해 WT는 투약 영역에서 KK + SW 조립
영역으로 실행됩니다.
- 이것은 스트로크 포지셔닝 유닛 (HuPo)에서 멈추고
벨트에서 들어 올려 고정되며 부분적으로 조립 된
어셈블리의 섀시 측벽이 정렬됩니다.
- 동시에 KK 트레이와 SW 트레이 포지셔닝이
이루어집니다.
- KK 트레이 스택(12) 및 SW 트레이 스택(12)은 각각의
인피드 벨트 상의 보호 인클로저 외부에 수동으로
배치됩니다.
- 두 개의 안전 격벽이 열리고 적재 된 트레이 스택이
각 지게차의 그립 위치로 실행됩니다.
- 두 개의 보안 격벽이 다시 닫힙니다.
- 각 그리퍼가 해당 트레이를 그립합니다.
- Z 축을 사용하면 트레이 분리와 위쪽으로 운송이
발생합니다 (제거의 실제 높이 이상)
- 센터링 및 트레이 안정화를 위해 센터링 지지대를
x-핸드를 통해 각 트레이 아래에 밀고 배치합니다.
- 지게차 Z축을 사용하여 각 트레이를 해당 센터링
패드에 배치합니다.
- 트레이는 구성 요소를 제거 할 준비가되었습니다.
- Scara 로봇의 다중 그리퍼를 사용하여 KK를 트레이에
고정하고 정렬 보조 장치로 중간 위치에 배치합니다
(조립을 위해 누락 된 그립 위치에서 픽업 할 때
부정확성을 달성하기 위해)
- KK를 스캔하고 다시 잡고 스캐너 결과가 정상이면
WT에 설치하십시오.
- n.i.O. KK는 n.i.O. 상자에 저장됩니다.
- Scara 로봇의 다중 그리퍼는 트레이의 SW를 잡고 정렬
위치에 배치합니다.
- SW가 다시 잡아서 WT에 설치됩니다.
- 장착 영역 전면으로 계속
- 제공된 트레이가 비어 있으면 해당 거부 벨트에
보관됩니다.
- 이를 위해 지게차는 x축을 통해 그에 따라
배치됩니다.
- 빈 트레이는 전체 트레이 스택이 처리되었을 때만
거부됩니다.
- 해당 안전 격벽이 열리고 빈 트레이 스택이 수동
제거를 위해 배출됩니다.
- 두 개의 보안 격벽이 다시 닫힙니다.
St.3.3: 마운팅 영역 전면
- 앞면은 별도의 둥지에있는 원주 WT에 위치합니다.
- Scara 로봇의 다중 그리퍼를 사용하여 KK + SW 조립
영역에 KK 및 SW가 장착 된 WT에서 앞면을 제거합니다.
- 전면은 장착 장치의 둥지에 위치합니다.
- WT는 조립 영역 KK+SW에서 장착 영역 전면으로 이송
벨트를 통해 실행되며 섀시를 누르고 있는 동안 허브
포지셔닝 장치에 의해 정지되고 벨트에서
들어올려져 고정됩니다.
- 위치된 전면은 WT의 회전식 리프팅 동작에 의해
결합됩니다.
- 성공적인 전면 조립이 완료된 후, 조립 유닛은 시작
위치로 이동하고 WT는


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


 독일
독일