

{kind=link}
{kind=link}
{kind=link}
[ perfil comerciante ]
We use cookies to optimize our website for you and to be able to continuously improve it. By continuing to browse the site you are agreeing to our use of cookies.
Disagree


máquinas de embalagem / embaladoras / Linhas de embalagem
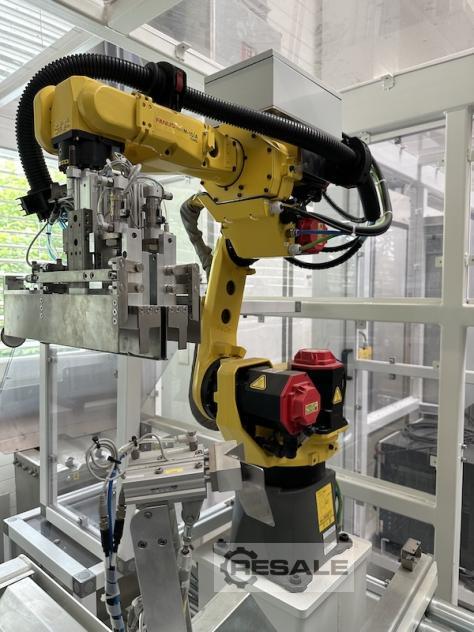
Fabricante: BECK AUTOMATION
Modelo:TO16
Tipo de máquina: Linhas de embalagem
Número do item: 167437784
Quantidade: 1
Data: 09.01.2026
Ano de fabricação: 2019
Localização:
 Suíça
4310 RHEINFELDEN
Suíça
4310 RHEINFELDEN
Preço:
| 2019 | BECK AUTOMATION | TO16 |